談到機器學習, 一定會談到神經元(英語:neuron)
神經元(neuron)
- 又名神經原或神經細胞,是神經系統的結構與功能單位之一。神經元能感知環境的變化,再將信息傳遞給其他的神經元,並指令集體做出反應。神經元佔了神經系統約10%,其他大部分由膠狀細胞所構成。基本構造由樹突、軸突、髓鞘、細胞核組成。傳遞形成電流,在其尾端為受體,藉由化學物質(化學遞質)傳導(多巴胺、乙醯膽鹼),在適當的量傳遞後在兩個突觸間形成電流傳導。
- 人腦中,神經細胞約有860億個。其中約有700億個為小腦顆粒細胞(cerebellar granule cell)(https://zh.wikipedia.org/wiki/%E7%A5%9E%E7%B6%93%E5%85%83) 。
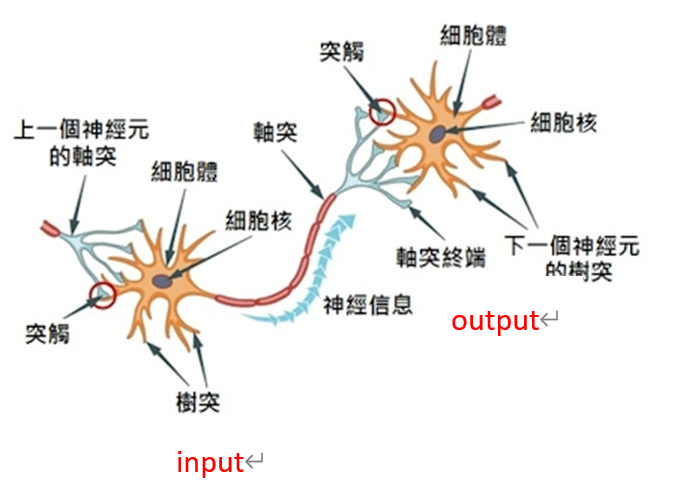
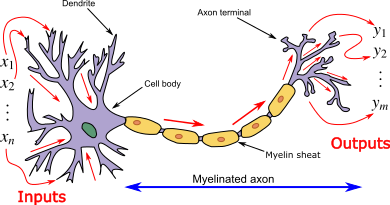
- 如果將樹突視為輸入(Input), 軸突視為輸出(Output),應該比較容易理解。神經元將來自樹突輸入的電子訊號(請參考,愛放電的神經細胞| 國家實驗研究院),與表示是否超過神經細胞內電位的閾值(Threshold,門檻值)進行比較,若超過該閩值,則此神經細胞便達到興奮狀態,從軸突輸出電子訊號(動作電位- 維基百科)。
MCP :形式神經元
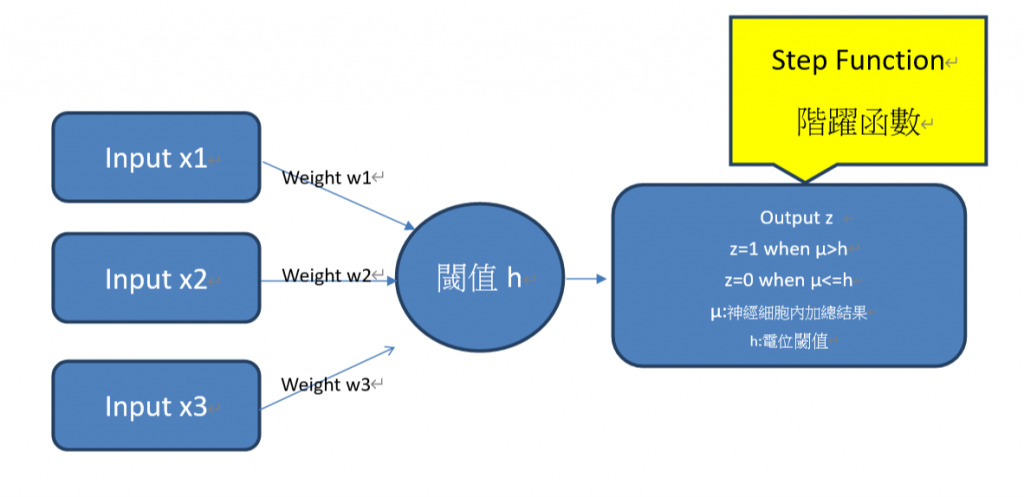
- 1個神經元會從n個神經元獲得輸入x,將這些輸入值乘上係數wi後進行加總,當結果µ超過閾值h,表示達到觸發狀態。這時,在人工神經網路裡最簡單的模型,也就 是麥卡洛克與皮茨(Macculloch&Pitts,1943)抽象的人工神經元模型MCP[i](MCP是作者的縮寫)當中,若µ超過閾值h則 輸出z為1,反之則為0.
- 沃倫·麥卡洛克和沃爾特·皮茨(1943)基於數學和一種稱為閾值邏輯的演算法創造了一種神經網路的計算模型。這種模型使得神經網路的研究分裂為兩種不同研究思路。一種主要關注大腦中的生物學過程,另一種主要關注神經網路在人工智慧里的應用。
- Warren McCulloch and Walter Pitts (1943) opened the subject by creating a computational model for neural networks.
(https://en.wikipedia.org/wiki/Artificial_neural_network)
- 不過,MCP模型中的權值都是預先設置的並不能進行學習。直到1949年心理學家Hebb提出了著名的Hebb定律(Hebb‘s rule),認為人腦神經細胞的突觸(神經元之間連接的位置)上的強度是可以變化的,計算科學家們才開始考慮用調整權值的方法來讓機器學習。
- 赫布理論描述了突觸可塑性的基本原理,即突觸前神經元向突觸後神經元的持續重複的刺激,可以導致突觸傳遞效能的增加。這一理論由唐納德·赫布於1949年提出,又被稱為赫布定律(Hebb's rule)、赫布假說(Hebb's postulate)、細胞結集理論(cell assembly theory)等
改變權值即是讓機器學習,以提高預測準確度。
註:本文是搜尋數個網站及各種不同來源之結果,著重在學習,有些內容已難辦別出處,我會儘可能列入出處,若有疏忽或出處不可考,請聯絡我, 我會列入, 尚請見諒。

